



Despite advances in computer vision, laser imaging, HD (high definition) mapping, and 5G, SAE Level 3 autonomous vehicles have not yet met the reliability, cost, and safety requirements for mass-market deployment. Moving beyond geofenced logistics operations and robotaxis requires advanced technology capabilities. Currently, fully autonomous vehicles in the U.S. are limited to a few cities, and consumer vehicles with autonomous features, like Ford’s BlueCruise, can only operate on about 3% of North American roads.
So, what is holding back the widespread deployment of L3 autonomy? The answer lies not just in design challenges and regulatory barriers, but in the fundamental question of how we think about vehicle localization.
The localization challenge and key to expansion
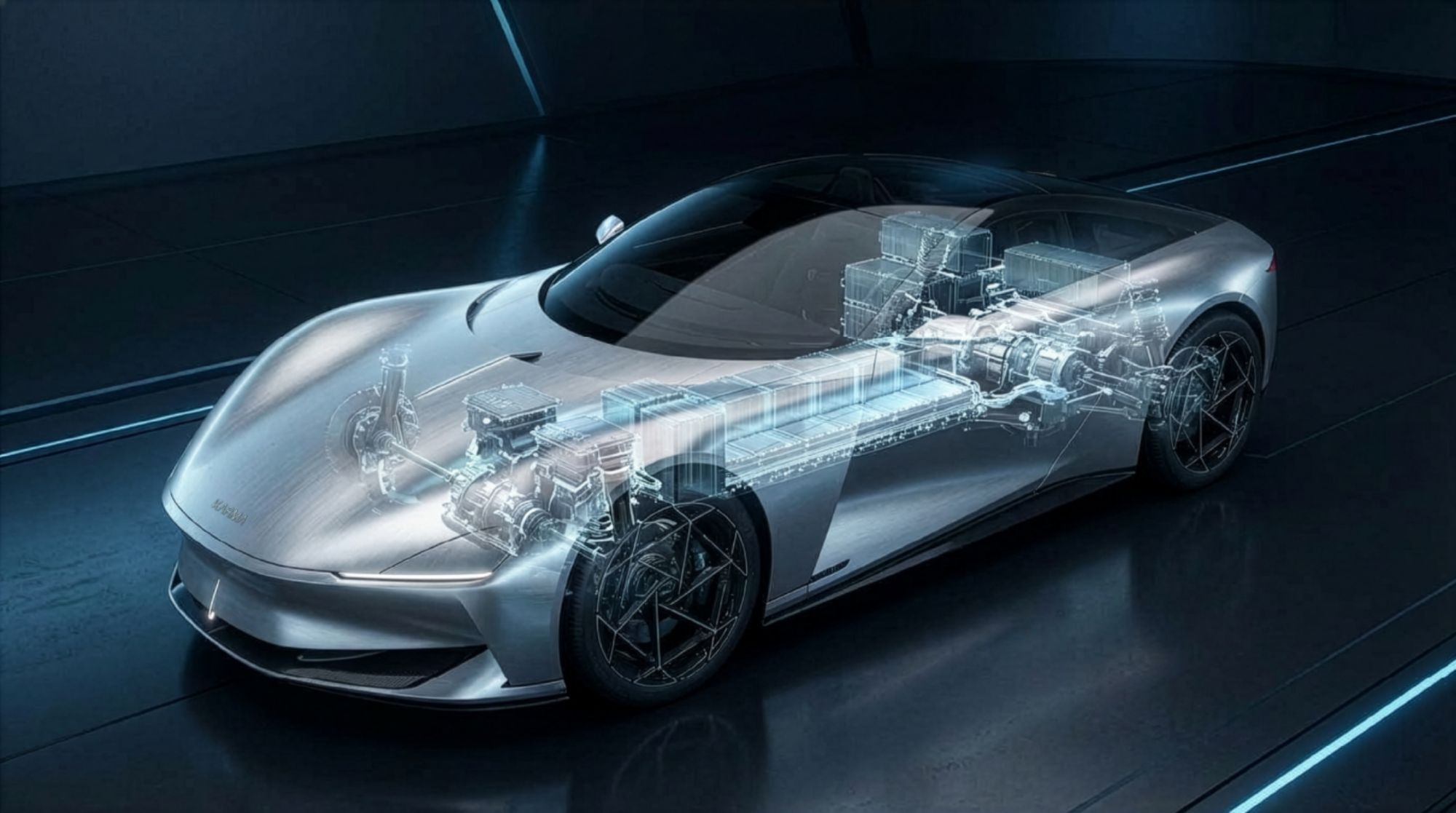
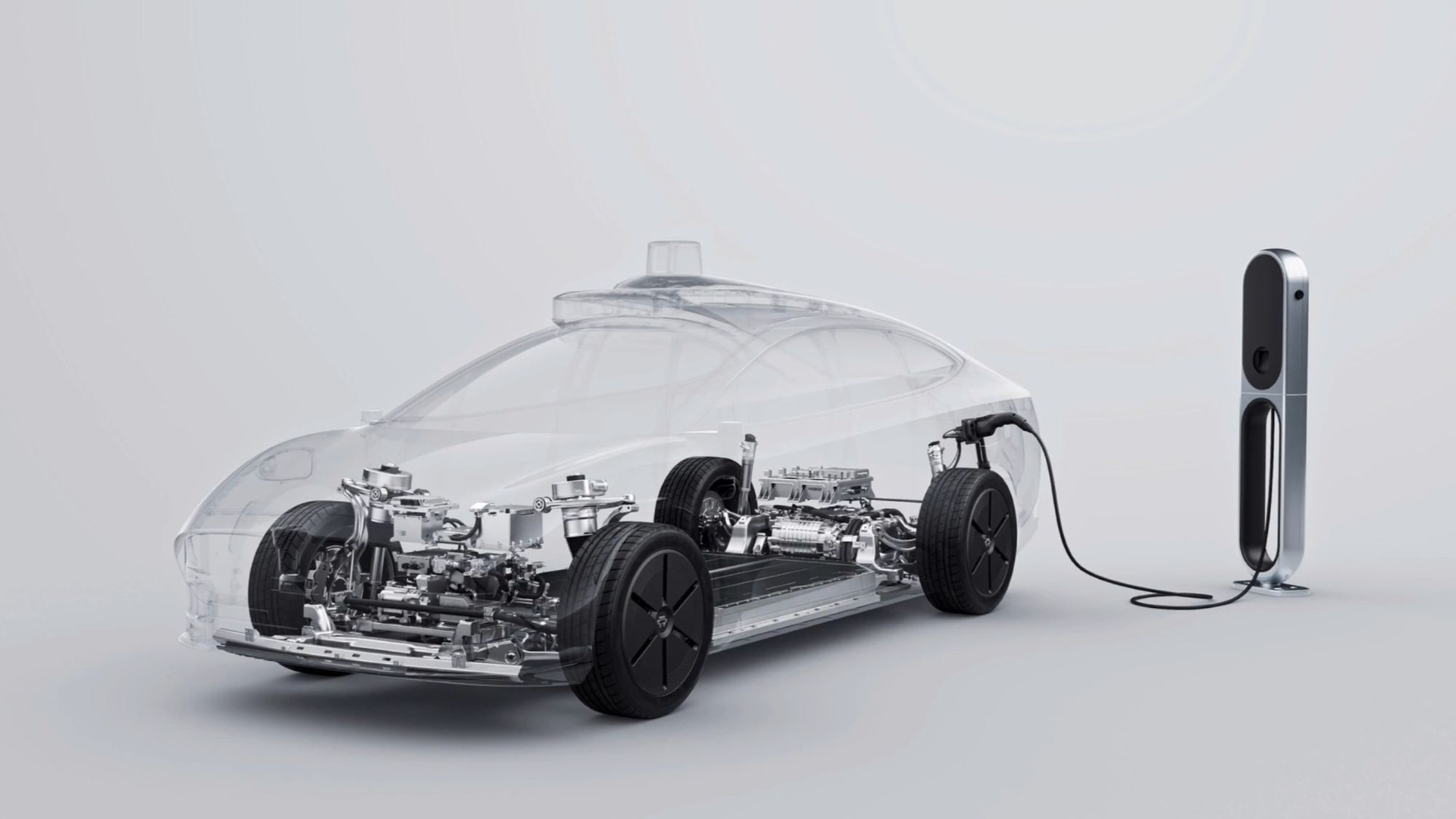
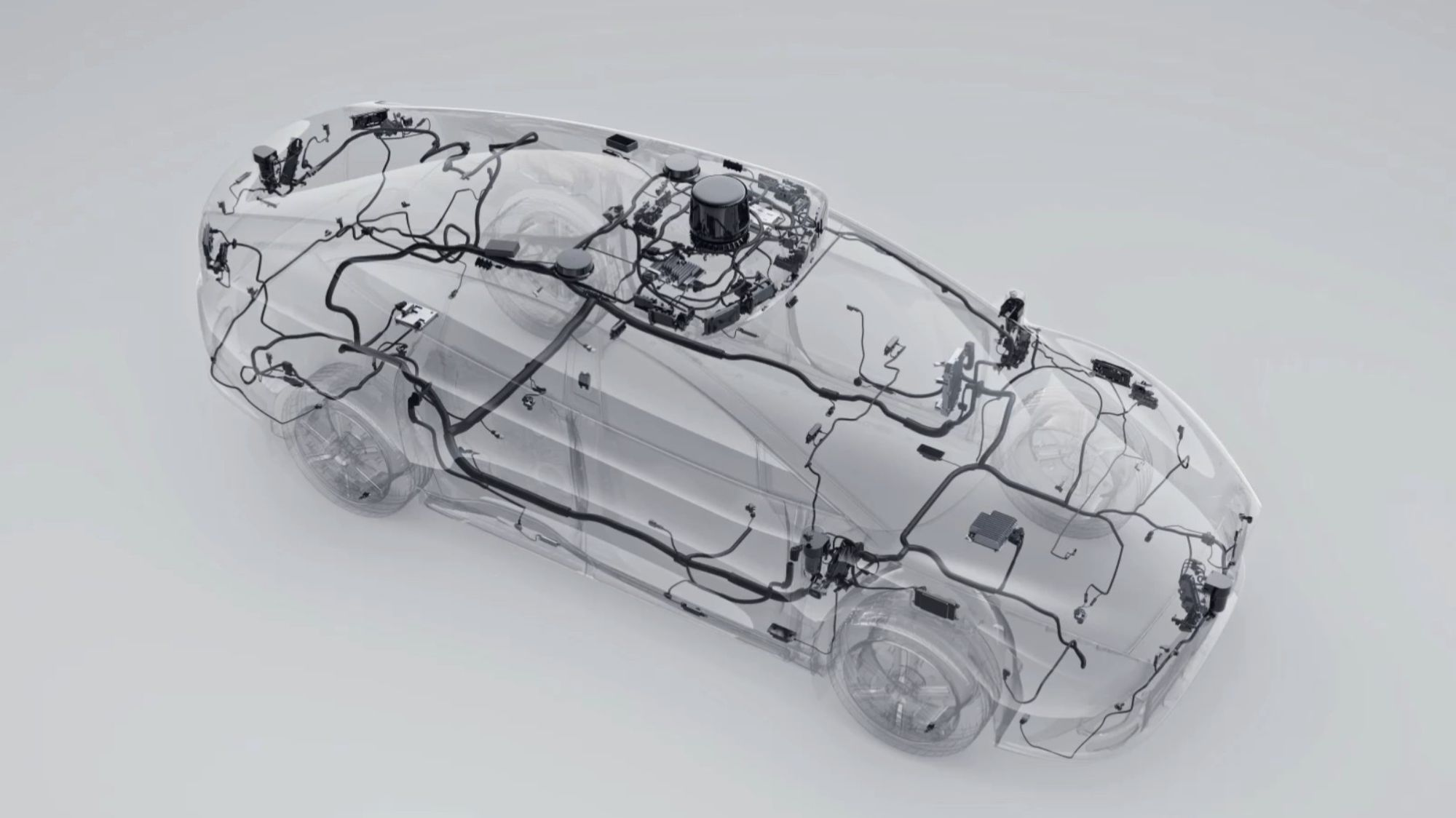
Autonomous vehicles mimic human perception using an array of perception sensors to ingest vast amounts of data about their surroundings and HD maps to help them make sense of what they “see” around them.
However, maintaining up-to-date HD maps and processing large amounts of data in real time is costly. Autonomous vehicles are limited by the availability of HD maps and physical features in the environment, making bustling city centers and major freeways ideal for deployment. These vehicles struggle to operate safely in less populated areas or poor weather conditions.
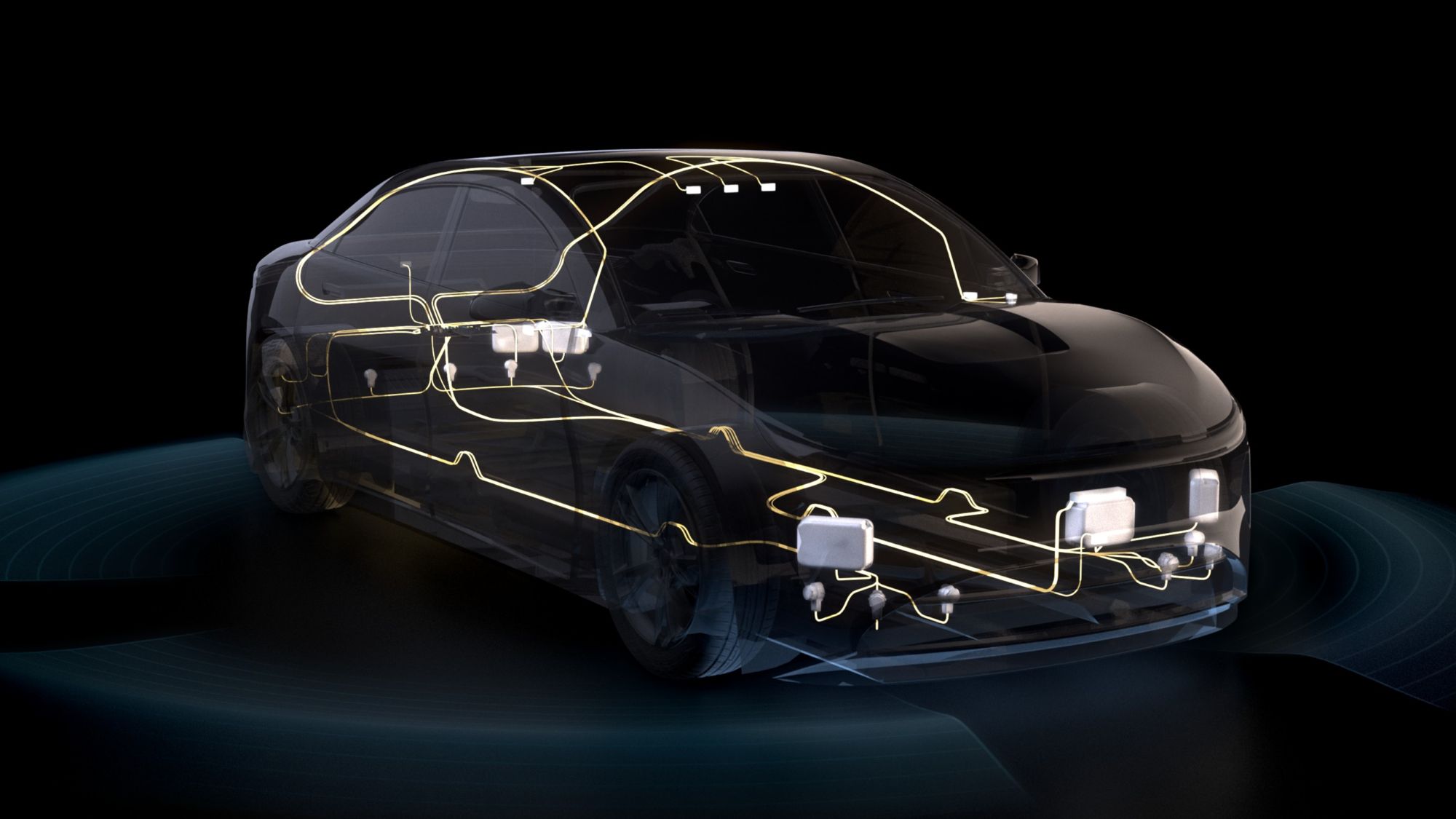
But vehicles have another under-used sensor in the localization tech stack that may hold the key to expanding autonomous deployments. Global Navigation Satellite System (GNSS) positioning is the only sensor that provides absolute location and is already used in navigation systems to facilitate route planning, turn-by-turn navigation, and traffic alerts.
GNSS provides absolute location and works well in poor weather and featureless environments. It requires less map data and can be used with standard network maps.
However, GNSS alone is not precise enough for autonomous driving due to signal errors. A complete solution augments GNSS with corrections and leverages motion sensors to fill in gaps to achieve lane-level accuracy and satisfy automotive safety requirements. This solution is known as “precise positioning,” which enables self-driving cars to operate safely and economically in a wider range of environments.
Taking it to the next level in the cloud
Any system that can leverage real-time and “unseeable” information, such as the precise absolute location of a vehicle, the presence of ice on the road, or the state of a pedestrian signal around the corner, can benefit from cloud computing. In each of these cases, the system must know the precise location of both the vehicle and relevant hazards or infrastructure with high accuracy and confidence to ensure the risk of error is vanishingly small. Cloud computing can enhance autonomous systems by leveraging real-time data such as precise vehicle location and road conditions.
For automated actions like braking or lane changes, the integrity of this information must be guaranteed according to the ISO 26262 standard, which sets rigorous safety requirements for vehicle components. It is designed to ensure vehicles operate safely even in the event of system failures and defines processes for identifying hazards and mitigating risks during development.
Swift Navigation, in collaboration with AWS (Amazon Web Services), developed the Skylark Precise Positioning Service, the first real-time cloud-based service to achieve ISO 26262 certification. Skylark delivers uniform, centimeter-accurate positioning for navigation, ADAS, and vehicle autonomy and is being deployed by automotive OEMs and Tier One suppliers like Bosch.
Achieving high-integrity positioning in cloud-based systems
Significant engineering efforts went into proving the safety and integrity of precise positioning and the integration for centimeter-level accuracy. These involve detecting changes or anomalies in satellite signal characteristics and atmospheric irregularities, considering influences and disruptions in the ionosphere and troposphere. To achieve certification, three critical elements went into demonstrating safety and integrity.
1) Models and algorithms for data integrity: Absolute positioning is calculated using data from GNSS and applying corrections to account for satellite data errors. Achieving centimeter-accurate GNSS positioning requires correcting errors in the GNSS signal. Engineers interjected 11 feared event types categorized into satellite issues such as clock step, clock drift, code carrier interference, unexpected maneuver, ephemerides error, inter-frequency bias; atmospheric irregularities like moving front, large TEC gradient, scintillation events; and station errors involving multipath, station failure.
These errors range from common, easily correctable issues to rare, complex events like volcanic eruptions affecting atmospheric electron density. Vast amounts of data are collected for testing, and rare events are simulated to ensure all potential threats to solution integrity are sufficiently accounted for to ensure the corrections are highly reliable. Accurate correction of these irregularities and robust models and algorithms are necessary to achieve infinitesimally small error rates.
2) Robust engineering processes, documentation, and reporting: As with any other automotive system subject to safety standards, cloud-based services must adhere to rigorous, well-documented development processes to demonstrate the absence of software bugs and vulnerabilities, the completeness of test cases, and iterative validation throughout development. These are crucial for meeting automotive safety standards.
3) Assessing cloud infrastructure against ISO 26262 standards: Although ISO 26262 was not originally designed for cloud-based solutions, the cloud offers advantages aligned with the standard’s requirements. Large cloud providers like AWS offer diversified infrastructure, distributed availability zones, auto-scaling deployments, real-time monitoring, and security and compliance tools. These features ensure system resilience and scalability for millions of global users.
A key challenge for GNSS corrections providers is delivering corrections at the scale required for mass-market autonomous vehicles. By deploying corrections service via AWS, engineers leverage cloud infrastructure for automated scalability, full data redundancy, best-in-class cybersecurity, and real-time monitoring. These cloud features make the corrections service uniquely suited to support autonomous vehicles at scale.
This development elevates the role of precise GNSS in the automotive sensor suite, adding a critical safety layer to autonomous systems, while significantly reducing processing power requirements and improving accuracy and reliability. The safety layer enables Level 3 autonomous systems to operate cost-effectively at scale and is already deployed in over 10 million vehicles worldwide.
The future of cloud-based automotive safety
Achieving ISO 26262 certification for real-time cloud-based services represents a significant shift in automotive system design. With additional safety-certified data sources, L2+ and autonomous driving systems can leverage a wider variety of data to improve safety, increase availability, and expand operational design domains.
Safe cloud-based systems will also have broader implications for other applications, such as vehicle-to-everything (V2X) communication, essential for fully autonomous transportation networks. As V2X applications develop, the cloud will play an increasingly important role in processing and sharing safety-critical data between vehicles.
James Tidd, Vice President of Systems Engineering at Swift Navigation, wrote this article for Futurride.
-

- Swift Navigation has brought precise GNSS positioning to the cloud.
-

- Sources and magnitudes of GNSS errors, according to Swift Navigation.
-

- James Tidd is Vice President of Systems Engineering at Swift Navigation.



































































{kind=link}