




Radar has played a major role in modern technology, as chronicled by Fraunhofer, and has been implemented to detect the distance between planes, understand weather patterns, and protect space travel. Its evolution has been remarkable, from the discovery of electromagnetic waves, to use in the military, and finding its place in the robotics and automotive industries, which are forging new paths of autonomy and advanced functionality.
Radars are the backbone of the technological revolution of the automotive industry, responsible for driver-assist reliability and safety. As the industry moves towards hands-off and eyes-off features, examining the role of radar will be more important since the responsibility for safety shifts to the technology embedded in the vehicle rather than the driver.
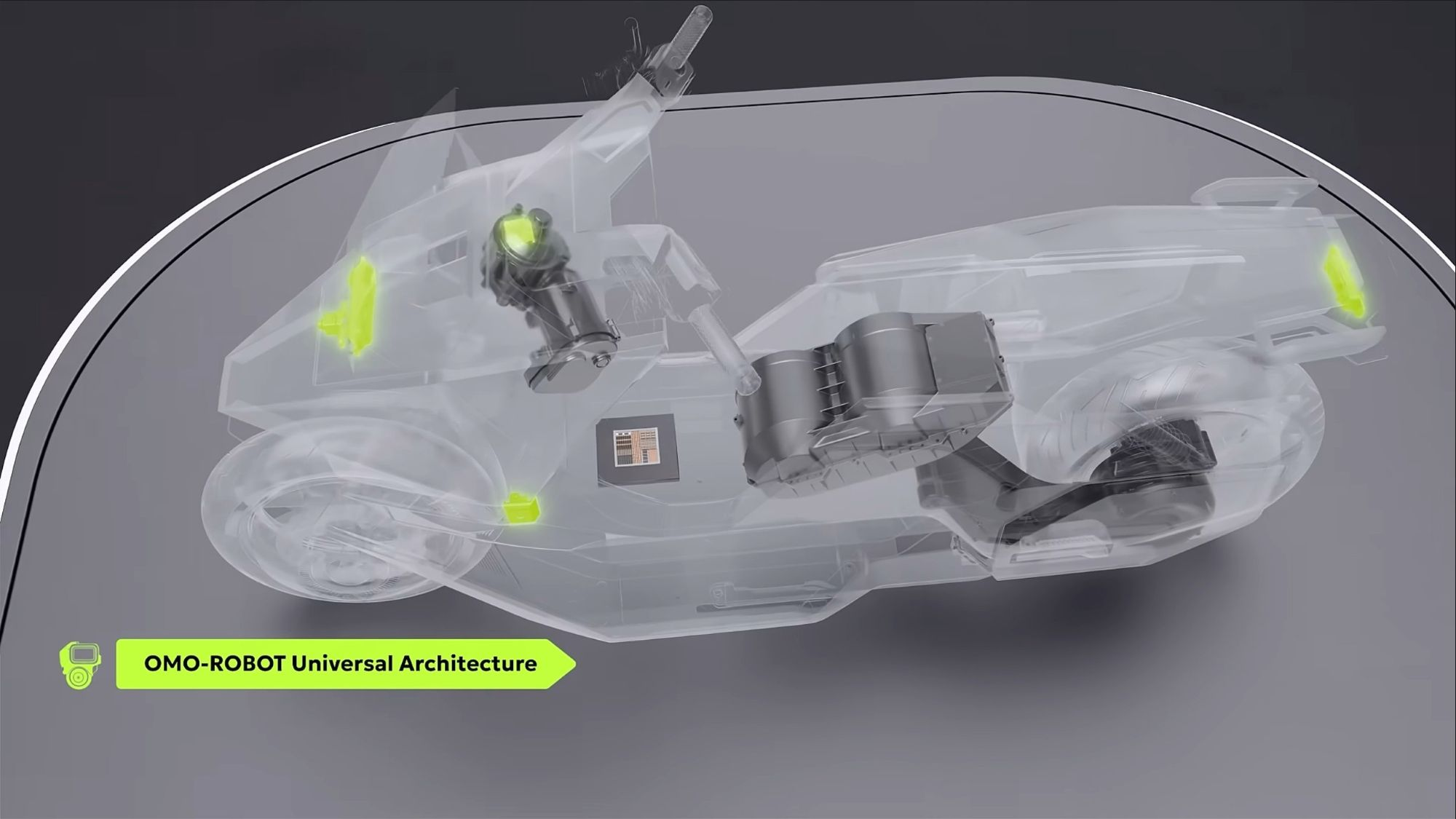
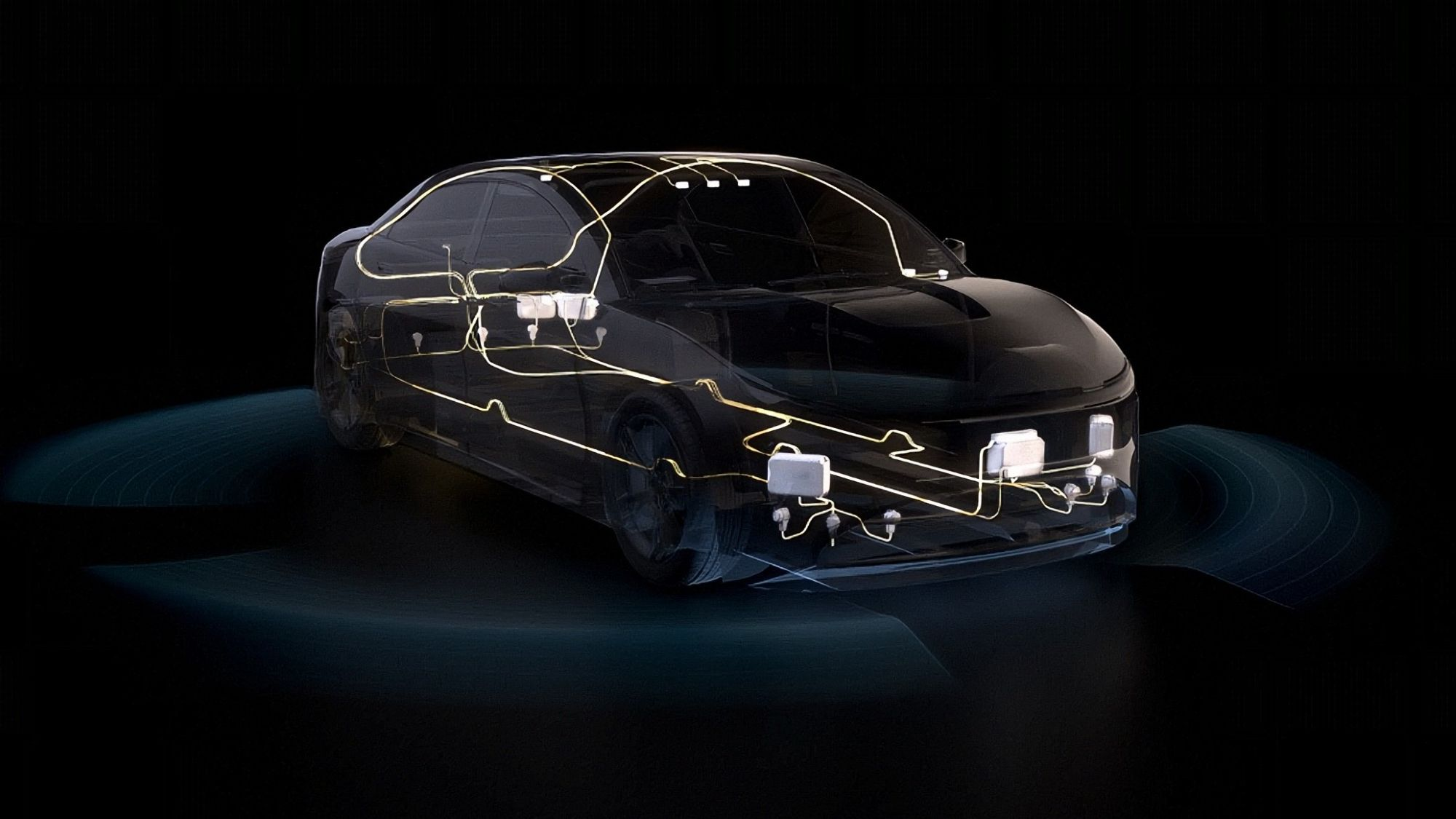
Vehicles must be equipped with multiple sensors in a suite so that their relative strengths leave no missing gaps in the overall system abilities. Radar has the unique capability to measure speed and depth in real-time while cameras can only estimate based on multiple frames, which is less accurate and does not occur in real-time. For a hands-free driving experience, radar systems need to offer redundancy to cameras (and sometimes lidars) and data diversity to provide information missing from optic sensors to facilitate perception at long range and all speeds. For radar to be able to provide data detailed enough to enable complete reliability, it needs to be developed from the ground up with unique capabilities.
There are three types of radar systems on the market grouped below based on their channel count: traditional, basic, and perception.
Traditional radar, or low channel count radar—typically 3 x 4 radar up to a 12- to 48-channel array—could work for basic ADAS (advanced driver assistance system) and AEB (automatic emergency braking) capabilities. This is because basic AEB only requires radar to detect objects in front of the vehicle and does not need accurate data like size and direction, which is necessary for more advanced features.
Traditional radar can detect moving but not static objects like parked vehicles; i.e., the issue cited in the media of not being able to detect parked first responder vehicles. It also has low or medium azimuth resolution and zero elevation resolution, which means detecting bridges could be a challenge and certainly detecting anything under a bridge would be an impossibility.
Another issue with traditional radar is that, due to the low channel count, there are many false alarms, which is why cars often have phantom braking or “false” detection. Some other features that traditional radar is not capable of include free space mapping and sensor fusion.
Traditionally, the technology is not designed for software-defined vehicles, which is the direction that all new vehicles are moving in.
Basic imaging radar, or radar with a 12 x 16 channel count to just less than a 300-channel array, is a big improvement from traditional radar, yet it still lacks the needed functionality to support advanced ADAS and AV (autonomous vehicle) features. The performance improvement from the basic radar is achieved by using larger antenna dimensions both in azimuth and elevation; however, to optimize performance and avoid false alarms, a higher number of RF channels—48 x 48—is needed for optimized performance.
Basic imaging radar is best used for ADAS technology. It has medium/high resolution in azimuth and elevation, which means it can detect bridges in elevation and can also offer some azimuth separation of targets. However, it cannot detect small objects at long range like lost cargo, its image capability is limited and does not enable detection of object boundaries, and it does not support the full features set needed for software-defined architecture.
These radars are indeed basic and not able to integrate into sensor fusion, and they do not support advanced perception features like free space mapping or hands-free and eyes-off driving.
Perception radar has an ultra-high resolution, with a channel count of 48 x 48 for a 2304-channel array, and is effective for L2+ vehicles up to full autonomous driving. It has high resolution in azimuth and elevation and zero false alarms so the system will not be notified of non-existent road dangers and will not trigger the phantom braking effect.
With perception radar, more than 10,000 detections are presented per frame, and it can sense all stationary objects whether a stationary vehicle or an obstacle on the road. Perception radar can also accurately classify objects so the vehicle will “understand” if there is a child or a vehicle on the road and can perform free space mapping, so the vehicle has a complete picture of its surroundings which is necessary for path planning. Sensor fusion is also critical to perception radar since the sensor often complements camera technology, and these two technologies must be “fused.”
To provide a truly safe driving experience, car makers need to evaluate the strengths of each radar and what they can bring to the vehicle. Historically, radars were not used for advanced features since they were low resolution and low reliability. Perception radar is a breakthrough technology that offers ultra-high resolution and reliability to improve basic ADAS features, meet NHTSA 2029 AEB standards, and offer advanced hands-free, eyes-off features.
Radar has certainly come a long way and is taking the automotive industry along with it.
Kobi Marenko, CEO of Arbe Robotics, wrote this article for Futurride.
-

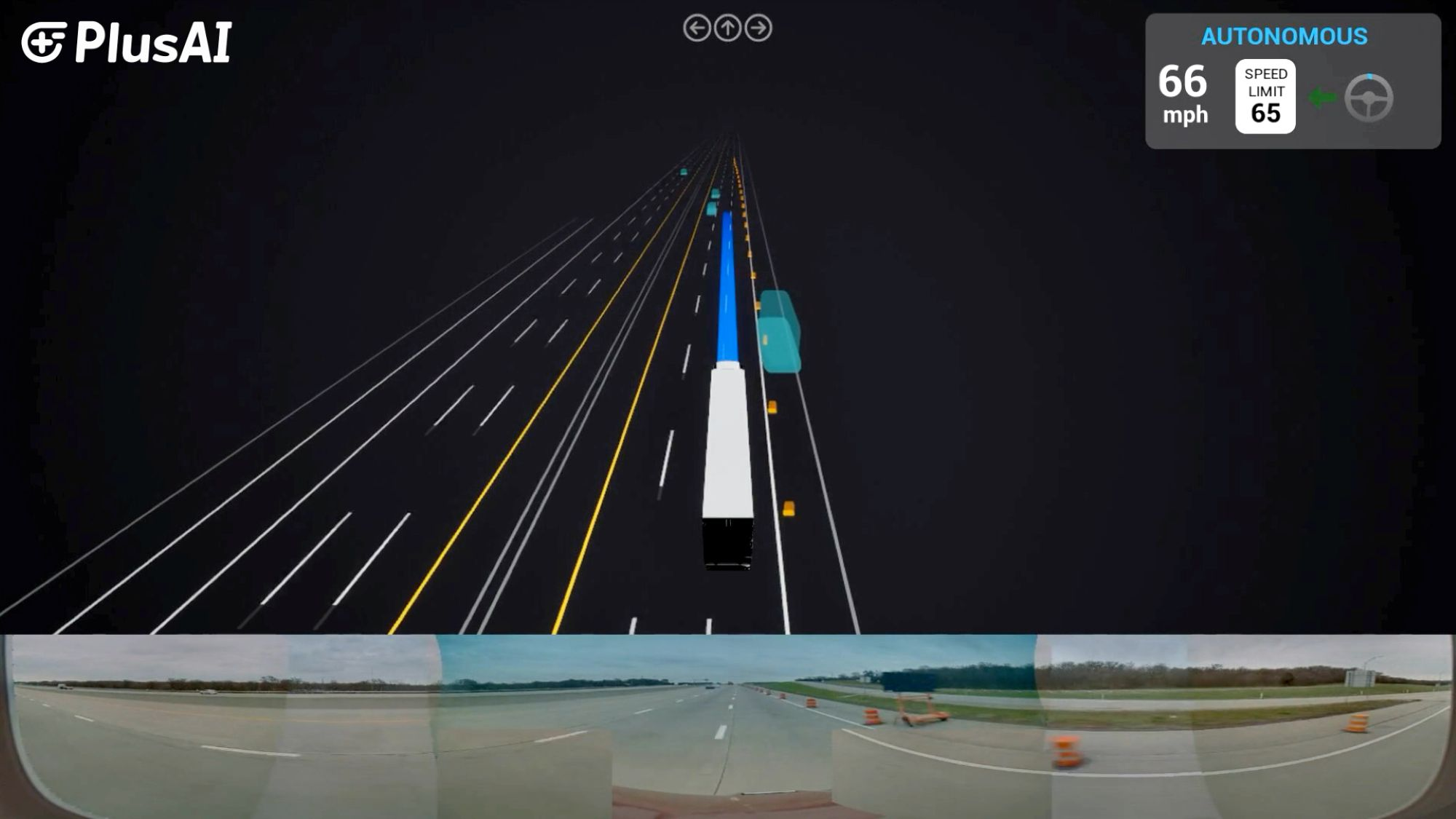
- Arbe radar in action on the highway.
-

- Arbe Robotics CEO Kobi Marenko.
-

- Arbe radar in action on busy city street.
-

- Arbe’s radar processor and Phoenix Radar B sample.




































































{kind=link}