



Tier IV has announced its selection for a project in Japan aimed at deploying robotaxis for transportation and autonomous trucks for logistics. Overseen by the country’s Ministry of Economy, Trade and Industry (METI), the initiative is designed to promote digital transformation in the mobility sector through autonomous driving development and PoC (proof of concept) tests. The maximum grant amount for the project in fiscal year 2024 is $4.5 million (¥700 million).
The company co-founded by Chairman Akimichi Degawa and CEO and CTO Shinpei Kato is the pioneering force behind the world’s first open-source software for autonomous driving (AD) called Autoware. It aims to build scalable platforms and deliver solutions across software development, vehicle manufacturing, and service operations—and is a founding member of the Autoware Foundation.
In May, Tier IV announced efforts to launch the robotaxi business in Tokyo in collaboration with partner companies. The company is working on several initiatives in preparation for the mass production of robotaxi vehicles and the nationwide deployment of robotaxi services including the development of a new robotaxi vehicle with Toray Carbon Magic, Tokyo robotaxi PoC tests with Nihon Kotsu, and verification of a robotaxi hub with Amane.
Initially targeting areas and times that conventional taxi operators struggle to serve, the service—set to launch a unique robotaxi service in November 2024—will begin with PoC tests in the Tokyo Bay area of Odaiba. The goal is a gradual expansion to cover major districts in Tokyo by 2025 and the entire metropolitan area by 2027.
Tier IV has developed multiple classes of reference design for developing AD systems based on Autoware. The reference design presents appropriate vehicle models and environments, referred to as ODDs (operating design domains), in which AD systems are verified and validated to be functional, using the company’s software platforms.
For technical validation, the robotaxi reference design incorporated into the Japan taxi vehicle model has achieved sufficient safety and availability, effectively defining ODDs even in heavy-traffic areas. Commercial applications have also been deployed successfully, leveraging several other variants that were inherited from the robotaxi reference design, for public transportation networks nationwide and in-factory logistics.
Also in May, Tier IV announced efforts to accelerate the development of the core functions of autonomous driving systems for highway trucks. It plans to provide reference designs to truck manufacturers, driving the deployment of autonomous vehicles in the logistics sector. The company’s initiatives include the development of autonomous trucks based on vehicles from Isuzu and Mitsubishi Fuso Truck and Bus, with technical support from both OEMs, in addition to PoC tests on Shin-Tomei Expressway, where a priority lane for autonomous vehicles will be installed.
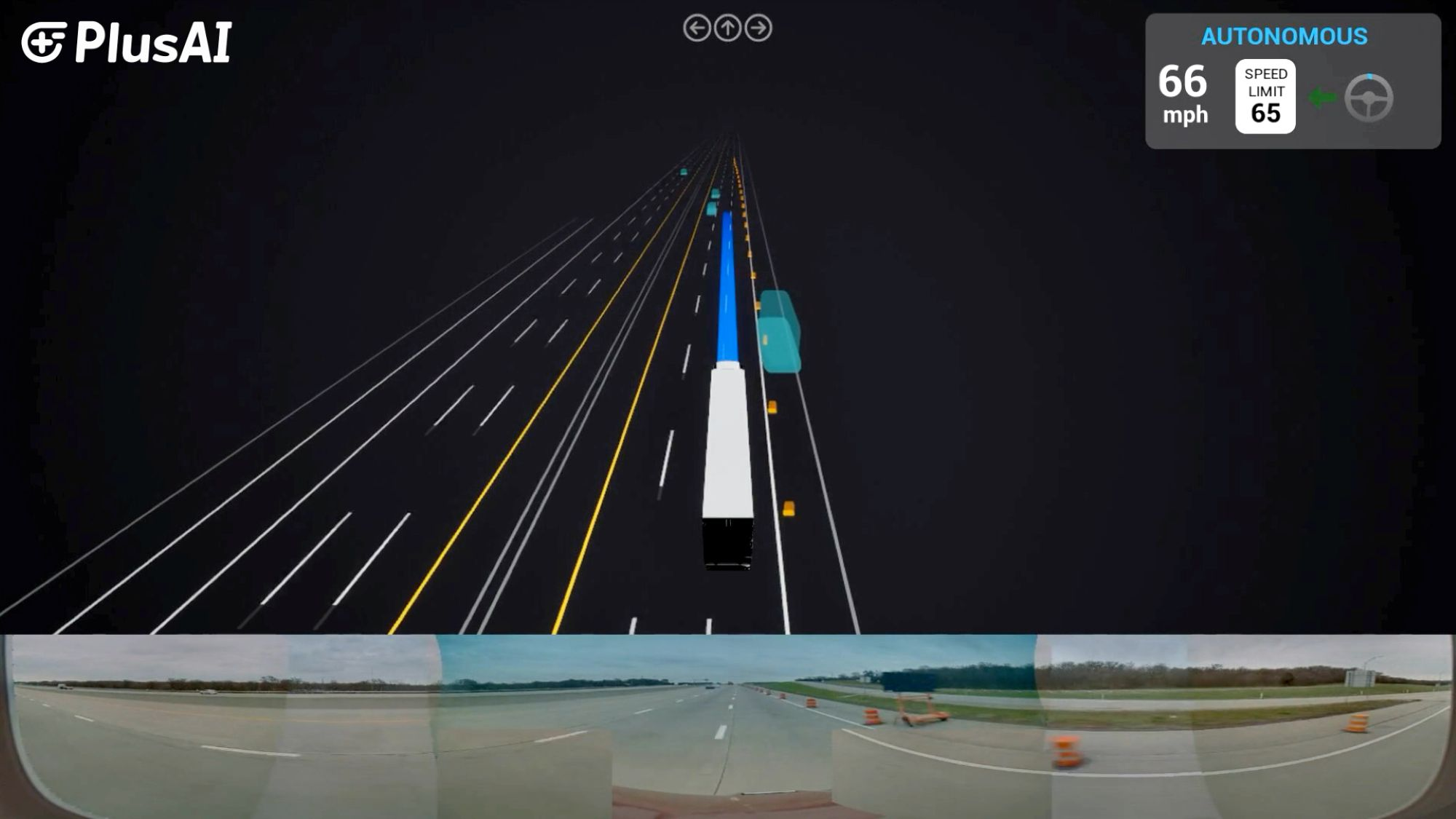
For the upcoming PoC tests, Tier IV is integrating the Mapless Autonomy Platform from German startup Driveblocks into its AD software. Using the startup’s software allows AD platforms to navigate using perception rather than HD (high definition) maps, a method proven effective on Europe’s challenging routes such as the Brenner Pass.
The integration of Driveblocks’ technology is particularly valuable for Tier IV’s highway trucking initiative as it creates a redundant safety layer and a secondary path for situations where HD maps become unavailable or outdated such as new construction areas. PoC tests conducted by the partners on highways have achieved reliable perception and accurate road corridor modeling at speeds up to 100 km/h (62 mph) under various driving conditions including standard highway scenarios, in Global Navigation Satellite System-denied environments like tunnels, and in low light.
Tier IV is placing a strong emphasis on continuing to develop robust object detection capabilities, enabling autonomous trucks to perceive their surroundings and navigate safely on the highway, especially in complex scenarios with diverse objects like merging vehicles and debris.
-

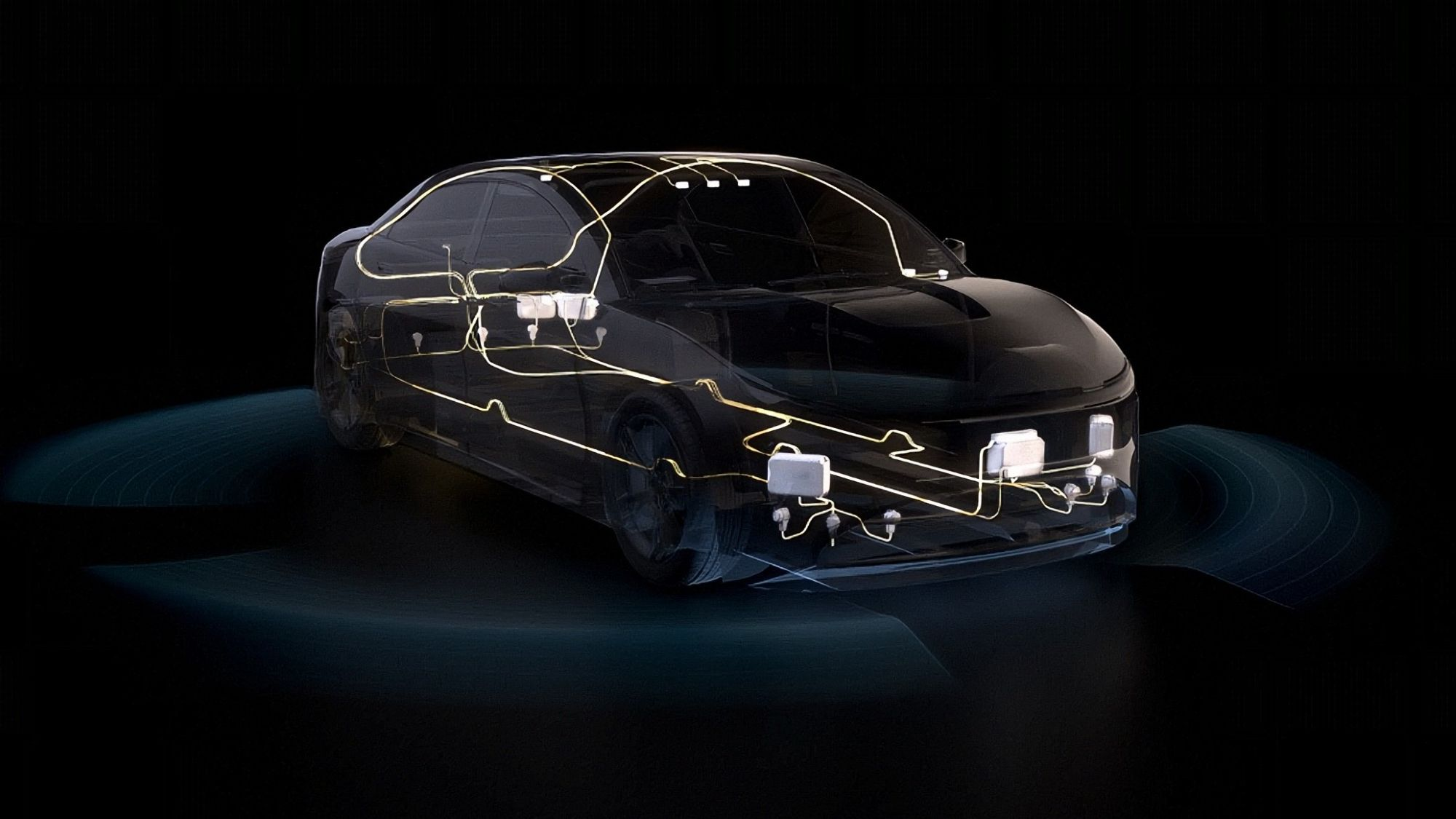
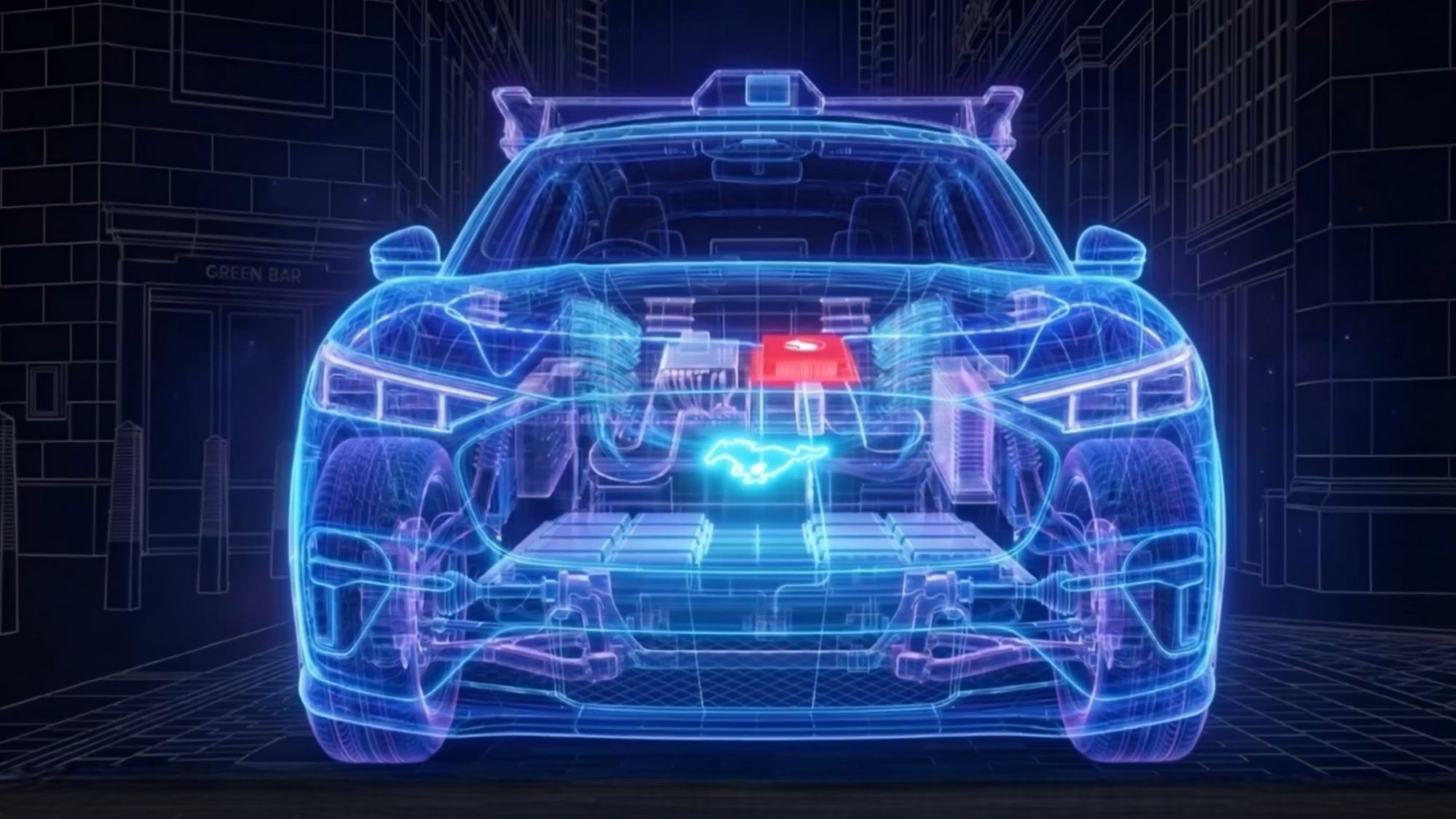
- Rendering of TIER IV’s robotaxi prototype.
-

- Tier IV and partners to launch a Tokyo robotaxi business.
-

- Driveblocks is providing Mapless Autonomy Platform to Tier IV.




































































{kind=link}